4025 River Mill Way Mississauga, ON L4W 4C1, Canada
India
4A, Maple High Street Hoshangabad Road, Bhopal, MP
UAE
Office 47, Oud Mehta Tower, 9th Floor, Next to Wafi City, Umm Hurair Second, Dubai, UAE
Noise Reduction for Player Tracking in Sports Analytics Using the Kalman Filter
1. INTRODUCTION
In sports analytics, accurate player tracking is paramount for extracting meaningful insights and improving game strategies.The systems of player tracking based on the bounding boxes can be deteriorated by some noise-related issues, such as flickering boxes and bad estimations of the players' position and erroneous distance measurements. These noise arise due to rapid player movement, occlusion, and detection inconsistencies, ultimately affecting the precision of the analysis.
The challenges are optimally solved through the Kalman filter, a recursive algorithm specifically devised to estimate the true state of a dynamic system by using noisy measurements, a combination of predictions from previous states and current observations. For instance, under challenging conditions, the Kalman filter minimizes detection errors and creates a smooth, accurate form of player movement in player tracking.
In this paper, we explore the implementation of the Kalman filter in bounding box-based player tracking, detailing its core components, the implementation steps, and the significant improvements it provides with respect to noise reduction and precision increase in tracking.
2. Problem Statement
In sports analytics, player tracking systems that rely on bounding box detection are important for sports analytics to determine the movement, positioning, and performance of the players. Such systems are, however, prone to many types of noise, therefore contributing to the degradation of the quality and accuracy of the data. Therefore, common types of noise include:
2.1 Flickering bounding boxes
Detection is irregular and changeable within frames, so bounding boxes can constantly flicker in the presence of constant visibility or vice versa, changing dimensions erratically. So, this analysis is unstable, unreliable, and often impossible for analysis of player behavior.
2.2 Inaccurate Position Estimations
Inaccurate position readings occur due to fast movement by the players. Changes in orientation and occlusions by other players or objects cause wrong position readings. These wrong position readings do not allow continuous and consistent tracking of players over time, leading to errors in tracking players overtime.
2.3 Distance calculation errors
There are inaccuracies in distance measurements between players due to noise in the bounding box data. Because distance is such an important variable in understanding spacing, movement patterns, and player interactions, errors in distance calculations may cause erroneous tactical analysis and decision-making.
Such types of noise are badly affecting player tracking systems and then result in distorted data that severely compromises the reliability of the analysis. This calls for filtering techniques to get rid of this noise and provide smoother tracking. It is here that Kalman filter comes in with the most suitable technique for stabilizing and correcting noisily obtained bounding box data.
Figure 4.2 Workflow
4.3 How the Kalman Filter Works
Predict the next state based on prior states and using the state transition matrix.
Update the predicted state by incorporating actual measurement data using the Kalman gain.
Refine the state estimate and reduce uncertainty by updating the covariance matrix
Repeat for every new frame or step in time to supply an updated accurate state estimation
4.4 Advantages of Kalman Filter
Real-time Processing: Kalman filter is recursive. It uses just the latest measurement and the last state to update the system so it might be very efficient at real-time applications. Noise Resilience: The balance of predictions with measurements tends to reduce the effect of the noise, providing better estimates even when measurements are unreliable. Adjustable: the Kalman filter changes the weight assignments between predictions and measurements dynamically, according to the better confidence of the other one.
5. Implementation of the Kalman Filter in Player Tracking
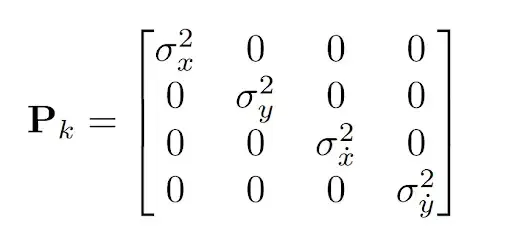
Where x2, y2are the variances in position, and x2, y2are the variances in velocity.
State Transition Matrix: This transition matrix accounts for state transitions from frame to frame.A very vivid example to depict this is that of constant velocity models. It describes how a player varies his position in terms of time, considering his velocity.
Process Noise and Measurement Noise: The process noise captures the inaccuracies in the system model, such as nondeterministic player movement; measurement noise captures the error in detecting the bounding box.
Step 2: Prediction
For each subsequent frame, the Kalman filter uses the state transition matrix to predict the player's next state (position and velocity).This step assumes where a player is going to be in the current frame based on his state in the last frame. In mathematical terms, it can be represented as
Predicted State:The predicted state is obtained as::
where Xk-1| is the state estimate from the previous time step.
Predicted Covariance: The predicted covariance matrix is updated with the use of the state transition and process noise matrices as follows:
Step 3: Measurement Update
Once a bounding box is detected in the current frame, the Kalman filter updates the prediction based on the measurement. This is the measurement update step, where the filter calculates how much to trust the noisy measurement and adjusts the predicted state accordingly.
Measurement Vector: The detected bounding box provides the observed position:
Where zx , zyrepresent the measured position of the player.
Measurement Matrix: Relates the state vector to the measurements. Since the measurement only includes position, the matrix is:
Kalman Gain: Determines how much to trust the measurement versus the prediction:
where Rk is the measurement noise covariance matrix, which represents the uncertainty in the measurements.
Updated State: The state is updated by blending the prediction and the new measurement:
Updated Covariance: The covariance matrix is also updated:
Step 4: Handling Missing or Noisy Measurements
Sometimes bounding box detections are missing (occluded) or very noisy. So that's nothing the Kalman filter objects to. When a detection is missing, the filter will continue its prediction of the state and track until it has enough new measurement again, which prevents drifting into drastic position jumps or erratic tracking. If bounding box detection is noisy, the Kalman filter compensates by reducing the dependence on the measurement and increasing that on the predicted state.
Step 5: Smoothing and Stabilization
This leads to a more stable and smooth tracking process because prediction followed by update is perpetuated. The Kalman filter also lowers the amount of flickering of the bounding boxes since noise in the detections averages out. Ultimately, it leads to the generation of increasingly more accurate estimates of the position and movement trajectory of the player, even when the bounding box detection system is generally noisy or erroneous.Step 6: Real-time PerformanceSince it only needs the current frame and the last known state to start predictions, the Kalman filter is highly efficient for real-time applications. It can be run at the frame rate of the video stream so that player tracking remains smooth and accurate without introducing delays or requiring large amounts of historical data.
An optimal solution for noise challenges in bounding box detection is the Kalman filter. The Kalman filter is powerful and recursive, estimating the state of dynamic systems from noisy data, making it ideal for smoothing and correcting inconsistencies within real-time tracking. The following are the key reasons that make player tracking make use of the Kalman filter:
3.1 Noise Reduction and Smoothing
The Kalman filter smooths flickering and erratic bounding boxes into a more accurate and stable estimate by covering it with noisy measurements of the predicted positions of the players, thereby reducing noise from bounding box detections.
3.2 Prediction and Correction
The Kalman filter runs on a continuous cycle of prediction and correction. Based on the player's previous position and movement, this filter predicts what their next possible position would be. Once the system receives a new detection of the bounding box, then it corrects the predicted location from the prediction, as there is always going to be a difference between the prediction and the true measurement. This way, even if detections are unreliable or going missing, it keeps the tracking accurate.
3.3 Handling Occlusions and Gaps
Player tracking often encounters occlusions, where a player is temporarily obscured from view. The Kalman filter helps to maintain the estimates of position when such gaps occur by utilizing predicted states from previous frames. This way, the tracking does not have to suffer as heavily from jumps or inaccuracies when the occluded player reappears.
3.4 Optimized Real-Time Performance
The Kalman filter is efficient in calculations. It easily fits within real-time applications like tracking players. It does calculations by using current frames and previous states only, hence works pretty well without keeping a massive amount of data from past frames; thereby, it ensures seamless performance in real time.
3.5 Minimize the measurement errors
The Kalman gain will balance the optimal trust between both the prediction by the system and the noisy measurements. If the measurements are too noisy or unreliable, it will use more of its own prediction. It will move the state estimates accordingly if the measurements prove to be reliable, with minimal error involved.
4. WHAT IS KALMAN FILTER
Kalman filter is an algorithm that may be used to compute the state of the dynamic linear system from noisy measurements. The principles behind the Kalman filter operate by predicting based on past states and then filtering out noises with new measurements. These features are very helpful in applications like control systems, robotics, navigation and computer vision because of the effective treatment of uncertainty and noise in a real-time system.
4.1 Key Components of the Kalman Filter
State Vector: A set of variables that describes the state of the system at any instant in time. Generally, it includes position, velocity, and possibly acceleration for player tracking.
Prediction Model: The filter predicts the next state of the system by using a state transition matrix. That is, it is modeling the evolution in time of how the system changes. Example: It knows how the position and velocity of a player determine the next position. This is done before new measurements are obtained.
Measurement Model: The measurement model employs measurements (in this example, bounding box information) for updating its predictions. The measurement function expresses the relationship between the actually observed values and the current system state. This is the step that corrects the predicted state due to real-world observations.
Covariance Matrix: Covariance matrix gives the uncertainty related to the state estimation. It determines how much it is with the current estimation from its updates for every new arriving measurement.
Kalman Gain: This is a weight that decides just how much of the new measurement to take on in state update. If the measurement is very noisy, then the Kalman gain is going to favor the prediction over the measurement. Conversely, if the measurement is certain, then the Kalman gain will weigh it heaviest within the update.
4.2 Prediction and Update Cycles:
A Kalman filter works in two main steps:
Prediction step: using the current state, the filter predicts the next state using the state transition matrix and with the noise process representing the uncertainty in the evolution of the system.
Update step: The filter computes the Kalman gain after receiving new measurements and updates state estimation using both prediction and measurements.
The Kalman filter can be applied to player tracking systems for noise reduction and improvement in the accuracy of bounding box detections. The description that follows is a step-by-step explanation on how to apply the Kalman filter in player tracking while paying attention to stabilizing the coordinates of the bounding box and dealing with noisy or missing detections. Step 1: Initialization During initialization, the implementation initializes key parameters
State Vector: This is a vector which contains the player's location and velocity. For instance, if one is tracking a player in 2 dimensional space then the state vector can be thought as, which are position, and are the velocity in the X and Y direction respectively.
Covariance Matrix: It can be seen as a depiction of the uncertainty over the initial state. This matrix begins with an uncertainty value that is very high which intuitively means that the estimate of position and velocity over the initial state isn't very reliable.
6. Evaluation and Results
The proposed Kalman Filter-based tracking system was challenged on a squash dataset. Three salient metrics tested the performance of the system:
Stability of Bounding Box: This is a measure of the reduction in flickering across frames; therefore, better player tracking consistency over time is indicated.
Distance Measurement Accuracy: The estimated distances between players were cross-checked against true measurements, thereby affirming that an important stride had been taken in improving the accuracy of tracking.
All three approaches have indeed shown significant improvements. The stabilization of bounding boxes, improved positional accuracy as well as estimations of distance are indeed observable which indeed points to the capabilities of the Kalman Filter.
7. What Can You Take Away from This White Paper
This white paper depicts a sophisticated and innovative way of enhancing player tracking systems by employing the Kalman Filter, as successfully applied in state estimations with signal processing. Some of the end results of using the Kalman Filter in player tracking will include having minimal flickering, improved positional accuracy, and increased bounding box stability. These advancements result in detecting accurate moves made by players, which in turn serves as crucial input for sports analytics and performance analysis.
Using the Kalman Filter, the sports analysts, coaches, and developers will have a better way to overcome the classic problems associated with the bounding box-based tracking systems. The novel solution will thus enable reliable tracking of players and, in turn, better tactics analysis and quick decision making.
Whether it's used in squash, football, or some other sport, the application of Kalman Filter-based tracking will certainly improve the quality of sports data analytics and provide actionable insights to teams to enhance the match day performance and competitive advantage. This is especially valuable in the growing field of computer vision in sports because precision and dependability of data are paramount for strategy optimization.
CONCLUSION
The white paper concludes that Kalman Filter considerably improves positional accuracy, bounding box stability, and distance measurement accuracy in player tracking for sports analytics. The method challenged standard issues in player tracking, such as flicker and noise, and offered more constant and reliable data for tactical analysis. Results have shown that the ability to track using the Kalman Filter not only makes real-time performance better but also fosters better decision-making when it comes to sports.
This technique would help in changing the way data on sports is analyzed. There is a robust solution to more accurate and consistent tracking of the movement of players for coaches, analysts, and developers.
Noise Reduction for Player Tracking in Sports Analytics Using the Kalman Filter